
幻仿编程 Udemy 付费课程,独家中英字幕 + 配套资料!
限时1折特惠!课程永久访问权,随时随地学习!
带有 V-REP / CoppeliaSim 的机器人
通过 5 个主要机器人项目的机器人仿真学习机器人技术
讲师:Hrithik Verma
你会学到什么
- 通过 V-REP / Coppeliasim 中的机器人仿真实现机器人技术
- 许多机器人模拟,如写作机器人、绘画机器人等。
- 使用 Reflexxes 运动库 (RML) 进行机器人仿真
- 从设计到机器人仿真
- V-REP/coppeliasim仿真软件从基础到进阶一步步深入
要求
- 你需要一台电脑/笔记本电脑来安装模拟软件
- 编程语言(如 C++、Python 等)的基本知识。至少要了解函数的基本知识
- 重量、速度、加速度、重心、扭矩等机械概念的基本知识。
- 接近传感器,视觉传感器等电子产品的基本知识。
- 高中数学和科学基础知识。
描述
概述
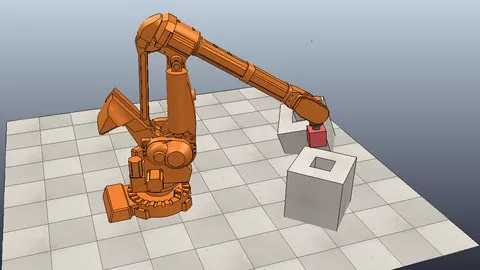
在本课程中,您将通过机器人模拟学习机器人技术。机器人模拟器是一种模拟器,用于在不依赖实际机器的情况下为物理机器人创建应用程序,从而节省成本和时间。在某些情况下,这些应用程序无需修改即可转移到物理机器人上(或重建)。
在V-REP / Coppeliasim中用于本教程系列的模拟器。它是一种用于创建、组合和模拟任何机器人的软件。它用于快速算法开发、工厂自动化仿真、快速原型制作和验证、机器人相关教育、远程监控等。
你将学到什么:
- 本课程采用简单的解释技术,从基础到高级逐步设计。
- 本课程包含许多令人兴奋的机器人模拟项目,并提供可供学习和实践的动手文件和资源。
- 机器人学的一些基本概念,如机器人框架、工具、逆运动学等。
- V-REP 中使用的 Lua 编程基础。
- 物体和机器人的机械特性及其在 V-REP 模拟器中的意义。
- 在 V-REP 中设置机器人层次结构。
- V-REP 中的基本关节类型和编码。
- V-REP 软件中存在的基本传感器类型及其编码。
- 讨论了从设计到机器人仿真的基本方法。
- 在 V-REP 中使用 Reflexxes 运动库 (RML) 进行机器人仿真
主要机器人项目:
- 从移动机器人设计到仿真基础知识。
- 线跟随无人机模拟。
- 编写机器人模拟
- 绘画机器人手臂模拟。
- 拾取和放置机器人模拟。
课程:
- 这个Couse分为1到7个模块。
- 一步一步地增加兴奋程度。
- 提供模拟文件供动手实践。
- 通过项目学习机器人技术
我的承诺:
虽然我不是机器人学的全部,但我保证我会以简单和诚实的方式深入地教你我所知道的一切。
欢迎来到机器人仿真世界
本课程适合谁:
- 任何对机器人技术感兴趣的人
- 没有流、分支或学位的限制。
| 共 36 节课程 • 总时长 4 小时 34 分钟 | |
| 第一章 课程介绍 | |
| 1. 如何下载V-REP CoppeliaSim软件 | 2分54秒 |
| 2. 如果您使用的是4.0.0以外的不同V-REP版本 | 3分44秒 |
| 3. 如何观看这个教程系列 | 5分6秒 |
| 第二章 V-REP模拟环境 | |
| 1. 环境 | 3分48秒 |
| 2. 导入对象及其属性 | 5分41秒 |
| 3. 移动对象 | 8分29秒 |
| 4. 哑光 | 1分32秒 |
| 5. 层 | 3分20秒 |
| 第三章 Lua编程,层次结构,关节,传感器 | |
| 1. Lua 与 Python 与 C++ 编程 | 13分36秒 |
| 2. 脚本 | 6分42秒 |
| 3. 层级结构 | 8分14秒 |
| 4. 旋转关节及其编码 | 8分32秒 |
| 5. 棱镜关节及其编码 | 3分35秒 |
| 6. 连接属性和连接模式 | 4分47秒 |
| 7. 接近传感器和图表 | 8分11秒 |
| 8. 视觉传感器 | 4分33秒 |
| 第四章 从移动机器人设计到仿真基础 | |
| 1. 导入设计文件和排列 | 9分3秒 |
| 2. 网格到简单形状 | 10分6秒 |
| 3. 设置层级 | 15分9秒 |
| 4. 移动机器人的编码 | 8分22秒 |
| 第五章 跟随线路无人机模拟 | |
| 1. import 路径 | 4分1秒 |
| 2. 循迹物体 | 6分22秒 |
| 3. 循线无人机详解 | 8分36秒 |
| 第六章 机器人模拟 | |
| 1. 正运动学和逆运动学概念 | 15分13秒 |
| 2. V-REP中的逆运动学模式 | 10分12秒 |
| 3. 写作机器人 | 13分55秒 |
| 4. 我的签名 | 4分59秒 |
| 第七章 绘画机器人模拟 | |
| 1. 机器人到达一个点 | 15分49秒 |
| 2. 机器人到达点 | 6分2秒 |
| 3. 工具设置 | 5分16秒 |
| 4. 点从开始移动到结束 | 7分36秒 |
| 5. 绘画机器人 | 6分38秒 |
| 第八章 使用RML的拾取和放置机器人仿真 | |
| 1. 使用RML到达一个点 | 7分14秒 |
| 2. 机器人使用RML移动到一点 | 9分21秒 |
| 3. 吸盘工具设置 | 9分18秒 |
| 4. 拾取和放置机器人 | 7分49秒 |
| 1. 关于课程更新与获取 如何获取本站课程? ○ 免费获取方式:在本站签到、评论、发布文章等可获取积分,通过积分购买课程。 ○ 付费获取方式:购买本站【月度会员】或【永久会员】。 课程购买后是否支持更新? ○ 是的,所有课程均提供免费更新服务。 我们致力于为您提供持续的学习支持。 如何获取更新? ○ 单独购买的课程: 您可在“个人中心”随时查看购买记录及最新下载链接,轻松获取免费更新。 ○ 永久会员: 您可在相关页面直接查看最新下载地址,随时免费获取更新。 ○ 非永久会员(重要提示):通过会员权限下载的课程,在“个人中心”可能不显示具体订单记录。 因此,会员到期后,您将无法通过“个人中心”查看最新下载链接。 ① 解决方案建议:续费会员: 恢复会员权限后,即可再次查看所有最新下载链接。 ② 妥善保存下载链接: 我们强烈建议您在会员有效期内,保存好本站分享的课程下载链接。通常,课程更新内容会直接补充到原有分享链接中。 |
| 2. 关于课程资料 课程下载后资料是否齐全? ○ 绝大部分课程资料齐全。 我们尽力确保您获得完整的学习资源。 ○ 少数情况说明: 极少数课程可能存在资料缺失情况。针对 Udemy 课程,资料形式多样,请知悉:本地文件(随视频下载): 此类课件通常随视频一并提供,下载即得。 ① 本地文件(含链接): 课件文件中会提供资料下载链接,您需自行访问链接下载。此类资料通常也可获取。 ② 在线平台存储(如 GitHub): 讲师会在视频中说明资料获取方式(如访问特定平台),请您按指引自行下载。 ③ Udemy 平台内资料: 部分资料需登录您在 Udemy 购买的账号才能查看。此类资料本站无法提供,除非您自行在 Udemy 平台购买该课程。 |
| 3. 关于课程字幕 是否提供中英文双字幕?原本无字幕的课程是否支持? ○ 是的,本站下载的所有课程均提供中英文双字幕,包括 Udemy 原本无任何字幕的课程。 我们致力于提升您的学习体验。 Udemy 字幕现状与本站服务: ○ Udemy 绝大多数课程本身不提供任何字幕。在少数提供字幕的课程中,也几乎不提供中文字幕。 本站字幕服务流程: ① Udemy 有字幕: 我们会将其翻译成中文字幕,与英文字幕一同提供。 ② Udemy 无字幕: 我们会通过技术手段识别生成英文字幕,再翻译成中文字幕,一同提供给您。 字幕服务重要说明(请您理解): ○ 翻译精度: 字幕翻译采用谷歌翻译引擎完成,虽不及人工翻译精准,但足以保障您正常学习理解。 ○ 若您仍然觉得字幕精度较低: 可联系站长针对性润色字幕(该服务仅限本站会员)。 |
| 4. 关于视频存储与使用 视频存储位置与观看/下载方式? 本站所有课程视频均存储于网盘平台。 您支持在线观看: 可在网盘内直接播放学习。 您支持下载: 可将视频下载至本地,使用播放器播放,更灵活便捷。 主要存储网盘:百度网盘 视频格式与加密情况? 本站所有课程视频均以 MP4 或 MKV 通用格式提供。 视频文件不加密,您可自由分享(请遵守相关法律法规)。 播放建议: 使用本地播放器(如 PotPlayer)播放时,可同时加载中英文字幕文件,学习体验更佳。您可参考我们提供的《PotPlayer 挂载中英双字幕教程》。 |
| 5. 关于售后支持与退款政策 遇到问题如何联系? 无论您在购买前或购买后遇到任何疑问,都欢迎随时联系站长。 我们将竭诚为您服务。 退款政策说明: 原则: 由于虚拟商品(课程、资料等)具有可复制性,一旦购买成功并完成下载,原则上不支持退款。 请您在购买前仔细阅读课程介绍、资料说明及本条款,确认符合您的需求。 如有不确定之处,欢迎先行咨询站长。 |
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END














暂无评论内容